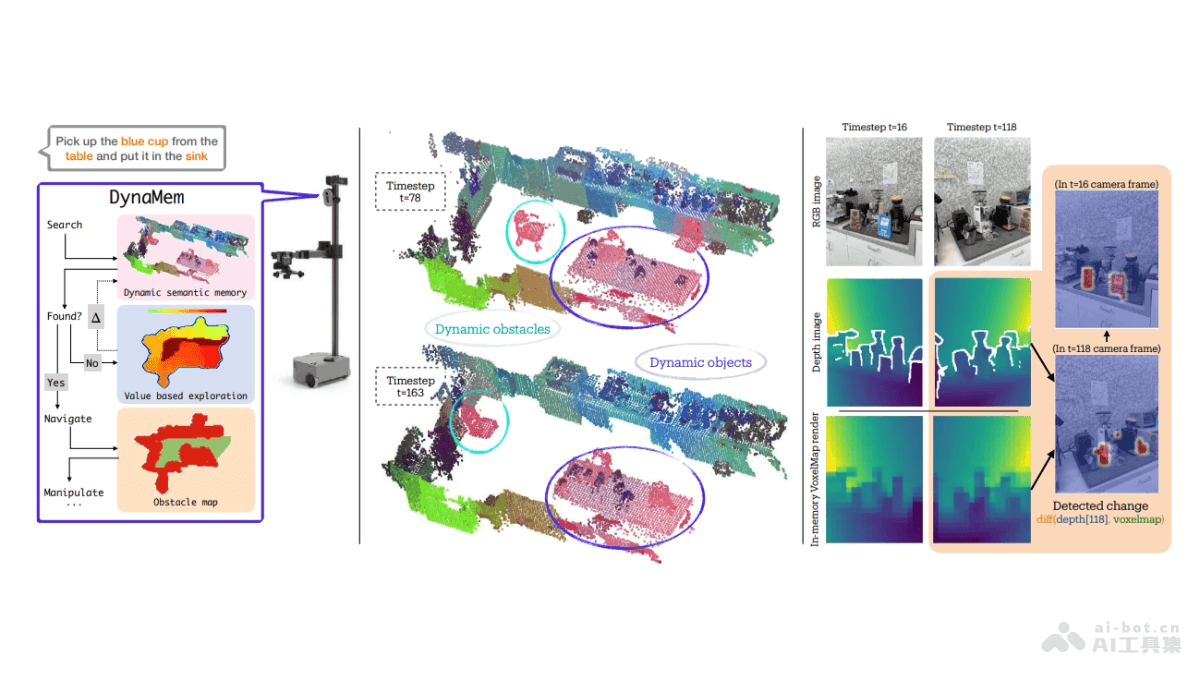
HOVER是英伟达推出的1.5M小模型,全称为“Humanoid Versatile Controller”,即人形机器人的多功能全身神经通用控制器。模型用150万参数实现对机器人复杂动作的控制,能适应多样任务如导航、桌面操作和移动操作等,每种任务需要独特的控制模式。HOVER的核心创新在于用全身运动模仿作为各种任务的通用抽象,提供通用的运动技能,用在学习多种全身控制模式。基于多模式策略蒸馏框架将不同控制模式整合到统一的策略中,实现模式间的无缝切换,且保留每种模式的优势,提高未来人形机器人应用的效率和灵活性。
 HOVER的主要功能多模式控制:HOVER能无缝切换不同的控制模式,如导航、桌面操作和移动操作等,每种模式都有特定的控制需求。运动学位置跟踪:HOVER支持对机器人关键部位的3D位置进行跟踪,实现精确的运动复制。关节角度跟踪:HOVER能跟踪每个机器人电机的目标关节角度,实现复杂的肢体动作。根跟踪:HOVER能跟踪机器人的根速度、高度和方向,对保持平衡和执行动态动作至关重要。统一命令空间:HOVER设计统一的命令空间,适应各种控制设备,如操纵杆、动作捕捉系统、外骨骼和虚拟现实头设。策略蒸馏:HOVER从Oracle策略中提取和蒸馏,将多种控制技能整合到单一的“通用策略”中,提高效率和灵活性。HOVER的技术原理本体感觉和命令屏蔽:HOVER基于本体感觉(机器人自身的状态感知)和命令屏蔽(选择性激活不同的命令空间)确定任务命令,支持独立控制机器人的上半身和下半身。多模式策略蒸馏框架:HOVER用策略蒸馏技术,将从大规模人类运动数据中学习到的Oracle策略转化为能处理多种控制模式的单一策略。DAgger框架:HOVER采用DAgger(Dataset Aggregation)框架对齐学生策略和Oracle策略的动作,基于监督学习优化学生策略。模拟训练:HOVER的训练在NVIDIA Isaac模拟套件中进行,套件基于GPU加速,能快速模拟长时间的训练,将模型迁移到现实世界中,无需额外的微调。统一命令空间设计:HOVER的命令空间设计既通用又原子,能覆盖大多数现有的控制配置,且能任意组合支持各种模式。运动重定向:HOVER能将人类动作数据集重定向为机器人动作数据集,基于匹配关键点和优化参数实现。HOVER的项目地址项目官网:hover-versatile-humanoid.github.ioarXiv技术论文:https://arxiv.org/pdf/2410.21229HOVER的应用场景导航与移动:HOVER能控制人形机器人在复杂环境中进行导航和移动,如在不平坦的地面上行走或在狭窄的空间中穿梭,适于搜索救援、导览服务等场景。桌面操作:在需要精细操作的桌面任务中,如组装电子元件或进行实验室工作,HOVER能精确控制机器人的上肢和手部关节,实现复杂的手眼协调操作。移动操作(Loco-manipulation):结合移动与操作的任务,例如在移动过程中抓取和搬运物体,HOVER能协调机器人的全身动作,实现流畅的搬运和操作任务。人机交互:HOVER支持各种输入设备(如VR头盔、动作捕捉系统、外骨骼)进行人机交互,让机器人能模仿人类的动作和行为,适于娱乐、教育和培训等领域。远程操作与仿真:在远程操作场景中,HOVER能实时响应操作者的指令,执行精确的远程任务,如远程手术辅助或危险环境作业。
HOVER的主要功能多模式控制:HOVER能无缝切换不同的控制模式,如导航、桌面操作和移动操作等,每种模式都有特定的控制需求。运动学位置跟踪:HOVER支持对机器人关键部位的3D位置进行跟踪,实现精确的运动复制。关节角度跟踪:HOVER能跟踪每个机器人电机的目标关节角度,实现复杂的肢体动作。根跟踪:HOVER能跟踪机器人的根速度、高度和方向,对保持平衡和执行动态动作至关重要。统一命令空间:HOVER设计统一的命令空间,适应各种控制设备,如操纵杆、动作捕捉系统、外骨骼和虚拟现实头设。策略蒸馏:HOVER从Oracle策略中提取和蒸馏,将多种控制技能整合到单一的“通用策略”中,提高效率和灵活性。HOVER的技术原理本体感觉和命令屏蔽:HOVER基于本体感觉(机器人自身的状态感知)和命令屏蔽(选择性激活不同的命令空间)确定任务命令,支持独立控制机器人的上半身和下半身。多模式策略蒸馏框架:HOVER用策略蒸馏技术,将从大规模人类运动数据中学习到的Oracle策略转化为能处理多种控制模式的单一策略。DAgger框架:HOVER采用DAgger(Dataset Aggregation)框架对齐学生策略和Oracle策略的动作,基于监督学习优化学生策略。模拟训练:HOVER的训练在NVIDIA Isaac模拟套件中进行,套件基于GPU加速,能快速模拟长时间的训练,将模型迁移到现实世界中,无需额外的微调。统一命令空间设计:HOVER的命令空间设计既通用又原子,能覆盖大多数现有的控制配置,且能任意组合支持各种模式。运动重定向:HOVER能将人类动作数据集重定向为机器人动作数据集,基于匹配关键点和优化参数实现。HOVER的项目地址项目官网:hover-versatile-humanoid.github.ioarXiv技术论文:https://arxiv.org/pdf/2410.21229HOVER的应用场景导航与移动:HOVER能控制人形机器人在复杂环境中进行导航和移动,如在不平坦的地面上行走或在狭窄的空间中穿梭,适于搜索救援、导览服务等场景。桌面操作:在需要精细操作的桌面任务中,如组装电子元件或进行实验室工作,HOVER能精确控制机器人的上肢和手部关节,实现复杂的手眼协调操作。移动操作(Loco-manipulation):结合移动与操作的任务,例如在移动过程中抓取和搬运物体,HOVER能协调机器人的全身动作,实现流畅的搬运和操作任务。人机交互:HOVER支持各种输入设备(如VR头盔、动作捕捉系统、外骨骼)进行人机交互,让机器人能模仿人类的动作和行为,适于娱乐、教育和培训等领域。远程操作与仿真:在远程操作场景中,HOVER能实时响应操作者的指令,执行精确的远程任务,如远程手术辅助或危险环境作业。